行走让机器人抵达位置,而精准操作才是其创造价值的核心。在具身智能从虚拟认知迈向物理交互的关键阶段,一个核心难题浮现:如何让机器人的操作策略与真实物理定律精准对齐?
当前,基于海量互联网数据训练的机器人“大脑”已能高效规划任务,但负责精细力控与接触交互的“小脑”却因高质量物理数据匮乏而发展受限。这一瓶颈在需要高自由度精细操作的场景中尤为突出——正如行业调侃:“教灵巧手抓鸡蛋,它学会了20个关节轨迹,却不知5个手指该用多大力。”问题的本质,在于灵巧操作数据在规模、真实性与力觉信息间存在的“不可能三角”。
在IROS 2025会议上,灵巧智能(DexRobot)系统性展示了其突破性技术体系,核心是在大会首日发布开源的DexCanvas数据集。这一数据基础设施的诞生,标志着行业从“硬件竞赛”转向“数据驱动系统构建”的关键转折,为解决具身智能的“物理对齐”难题提供了系统性方案。

一、数据困境:物理智能的“三重矛盾”
灵巧操作数据采集面临三大核心挑战:
1.遥操作:虽能获取真实力控信息,但效率低、成本高,难以规模化;
2.视频学习:数据规模大,但缺乏深度与力觉维度,仅能捕捉“表面动作”;
3.仿真合成:可快速生成海量数据,但仿真与现实的物理鸿沟始终难以弥合,导致模型“有姿势无实质”。

更深层的问题在于,现有数据集普遍存在“轨迹完整而物理信息缺失”的缺陷。机器人可复现人类手指运动轨迹,却无法感知接触点的微妙力变化,导致在拧瓶盖、插拔接口等任务中表现不佳。业内专家指出:“当前灵巧手研究的瓶颈不在于算法,而在于训练数据缺乏物理完备性。我们需要的不仅是动作的‘影像’,更是力觉的‘灵魂’。”
二、DexCanvas的破局之道:从“数据采集”到“物理补全”
DexCanvas数据集通过三大创新步骤,系统性解决了数据质量与规模的矛盾:
1.精准采集与结构化设计:覆盖全场景操作空间
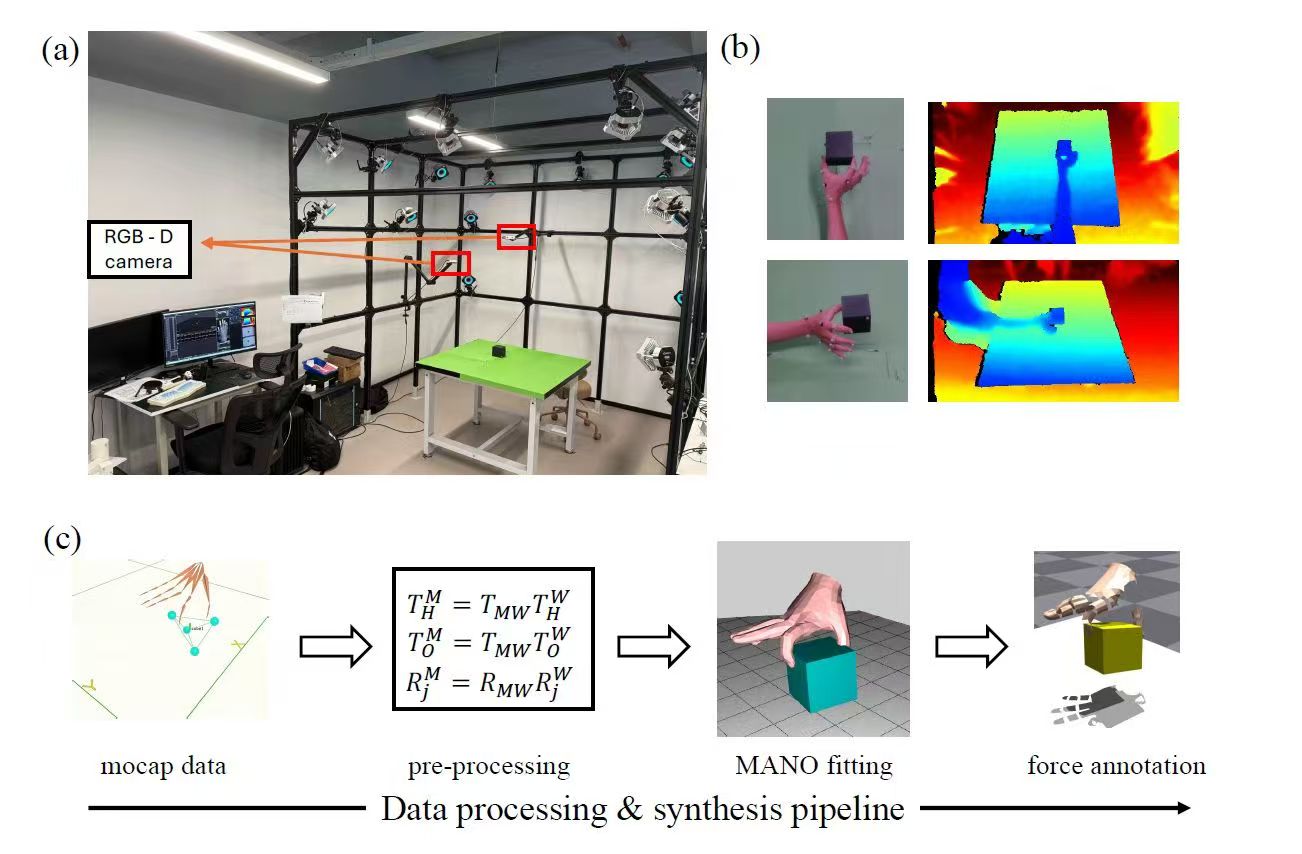
基于Cutkosky抓取分类学,研究团队系统设计了22类操作模式,覆盖从精密捏取(如针线操作)到力量抓握(如提拉重物)的完整空间。通过高精度动捕系统,实现亚毫米级轨迹记录精度,同步采集RGB、深度、动作轨迹等多模态数据,为物理反演提供丰富输入。
2. 物理反演与力觉补全:让数据“活”过来
这是DexCanvas的核心创新。团队将真实人类演示轨迹置入物理仿真环境,通过强化学习智能体复现轨迹。只有当接触点施加正确的力时,仿真物体运动才能与真实演示一致,从而自动推导出缺失的力觉与接触信息。这一过程实现了从“动作影像”到“物理灵魂”的补全,使数据具备真正的物理意义。
3. 物理一致的数据增强:1000小时→10万小时
在保持物理真实性的前提下,通过调整物体质量、摩擦系数等参数,将1000小时真实演示扩展为10万小时增强数据。这种增强基于物理规律外推,而非简单复制,显著提升了数据的泛化能力,使模型能适应更多未知场景。
三、技术验证:让机器人“真正理解物理”
基于DexCanvas数据集训练的算法在多种灵巧操作任务中表现优秀:
抓取易碎品:模型能根据物体材质(如玻璃、陶瓷)动态调整力度,避免破碎;
操作精密仪器:在插拔接口、旋转旋钮等任务中,模型能精准控制接触力,确保操作成功;
自适应环境:面对不同摩擦系数、重量的物体,模型能快速调整策略,实现稳定操作。
算法不仅模仿动作,更理解了操作背后的物理原理,真正实现了“如何用力”的智能决策。
四、开源与行业影响:从“封闭开发”到“开放协作”
为推动领域协同发展,灵巧智能于10月21日在Hugging Face等平台开源DexCanvas数据集。这一举措将带来三方面变革:
1.建立量化基准:基于Cutkosky分类体系的22类操作模式与统一精度标准,解决了数据规范不统一的问题,为领域提供可对比的“标尺”;
2.降低研究门槛:配套提供标准接口、数据加载器与完整处理代码,使团队可专注于算法创新,而非重复造轮子;
3.促进跨平台迁移:人源数据与硬件无关的特性,打破了数据与特定平台的强绑定,为技能迁移提供了可能,加速技术落地。
这一开放策略正在重塑行业生态,从孤立开发转向基于共享基础设施的协同创新。随着更多团队在DexCanvas基准上迭代优化,灵巧操作技术将进入加速发展阶段,为机器人、制造业、医疗等领域构建可持续发展的技术底座。
DexCanvas,连接数字与物理世界的桥梁
灵巧智能在IROS 2025的展示,清晰勾勒出一条以高质量数据为驱动、物理一致性为核心、真实硬件为验证的技术路径。DexCanvas的推出,不仅是一个数据集,更是一套系统性解决具身智能“物理对齐”难题的工程与学术基础设施。
在具身智能迈向通用化的进程中,谁能率先构建起数字智能与物理世界的桥梁,谁就将掌握未来话语权。灵巧智能正通过DexCanvas,努力成为这座桥梁的关键奠基者,推动机器人从“机械执行者”迈向“智能创造者”。








